تصاویری که مشاهده می کنید مربوط است به اولین مولتی روتورهای تولید شده در جهان در مدل های کوادکوپتر، هگزاکوپتر و اکتاکوپتر که وب سایت شرکت نگاه آسمان در مطالب قدیمی خود آن را منتشر کرده است. انتشار این تصاویر در وب سایت جدید صرفا به منزله انتشار و ماندگاری مطالب قدیمی است.
انواع و دسته بندی ربات های پرنده مولتی روتور
پیشوند اعداد یونانی و معادلهای فارسی آن:
مونو = یک
دی = دو
تری = سه
تترا = چهار
پنتا = پنج
هگزا = شش
هپتا = هفت
اکتا = هشت
نونا = نه
دکا = ده
آندکا = یازده
دودکا = دوازده
تری دکا = سیزده
تترادکا = چهارده
پنتادکا = پانزده
هگزادکا = شانزده
هپتادکا = هفده
اکتدکا = هجده
نونادکا = نوزده
ای کوزا = بیست
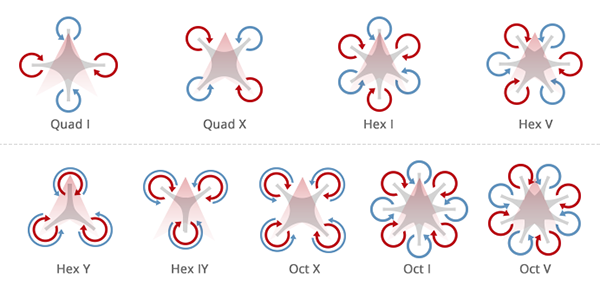
دسته بندی مولتی روتورها
مولتی روتورها به صورت معمول به شش دسته بندی تقسیم می شوند
(مدل های متداول کواد، هگزا و اکتاکوپترها هستند)
بی کوپتر – Bicopter (ربات های پرنده با ۲ بازو)
تری کوپتر – Tricopter (ربات های پرنده با ۳ بازو)
کوادکوپتر – Quadcopter (ربات های پرنده با ۴ بازو)
پنتاکوپتر – Pentacopter (ربات های پرنده با ۵ بازو)
هگزاکوپتر – Hexacopter (ربات های پرنده با ۶ بازو)
اکتاکوپتر – Octocopter (ربات های پرنده با ۸ بازو)
تغییر جهت در مولتی روتورها براساس چه مکانیزمی است؟
تغییر جهت در مولتی روتورها براساس تغییر سرعت موتورها نصب شده بر روی هر بازو است. برای مثال اگر یک کوادکوپتر بخواهد به سمت جلو حرکت کند، دو بازوی مخالف یعنی بازوهای عقب دارای سرعت بیشتر خواهد شد.

تصویر یک نمونه مولتی روتور با دو موتور به نام Bicopter

اکتاکوپتر با فریم و بدنه کربنی همراه با گیمبال شرکت تاروت

کوادروتور با فریم کربنی با قابلیت حمل یک دوربین خاص

کوادروتور با قابلیت حمل دوربین SLR و یک گیمبال سروو ساده

اولین نسل از اکتاروتور ها با گیمبال سروو ساده

کوادکوپتر شرکت Xaircraft جزو اولین شرکت های تولیدکننده کوادکوپتر

هگزاکوپتر با قابلیت حمل دوربین SLR

کوادکوپتر با دو موتور دوبل در هر بازو

اکتاروتور کربنی

گیمبال قدیمی با موتورهای سروو

کوادروتور با دوربین گوپرو







هیچ دیدگاهی نوشته نشده است.